人形机器人连续后空翻技能突破,强化学习助力动作技能提升
AI导读:
北京一家机器人研发团队成功展示了能够连续后空翻的人形机器人,通过强化学习和硬件创新,仅用三周时间就让机器人掌握了这一高难度动作,展现了人工智能在动作技能方面的巨大潜力。
这两天,人形机器人的技能再次取得突破。北京一家机器人研发团队成功展示了能够连续后空翻的人形机器人,这一创新引发了广泛关注。
总台央视记者张春玲:机器人技术又迈上了新台阶!身旁这个身高仅1米3的人形机器人N2,刚刚成功完成了多个连续后空翻的高难度动作。
团队技术负责人姜哲源:后空翻的难度在于人体后脚掌较短,翻转时容易失去平衡。为了实现这一动作,团队在硬件设计上进行了创新,将重量较大的关节集中在胯部,并采用强劲电机和轻质材料,使机器人拥有更强的爆发力。
为了实现机器人后空翻的稳定性,团队进行了深入研发。尽管后空翻动作复杂,但该团队仅用三周时间就让机器人掌握了这一技能。
那么,机器人是如何学会后空翻的呢?
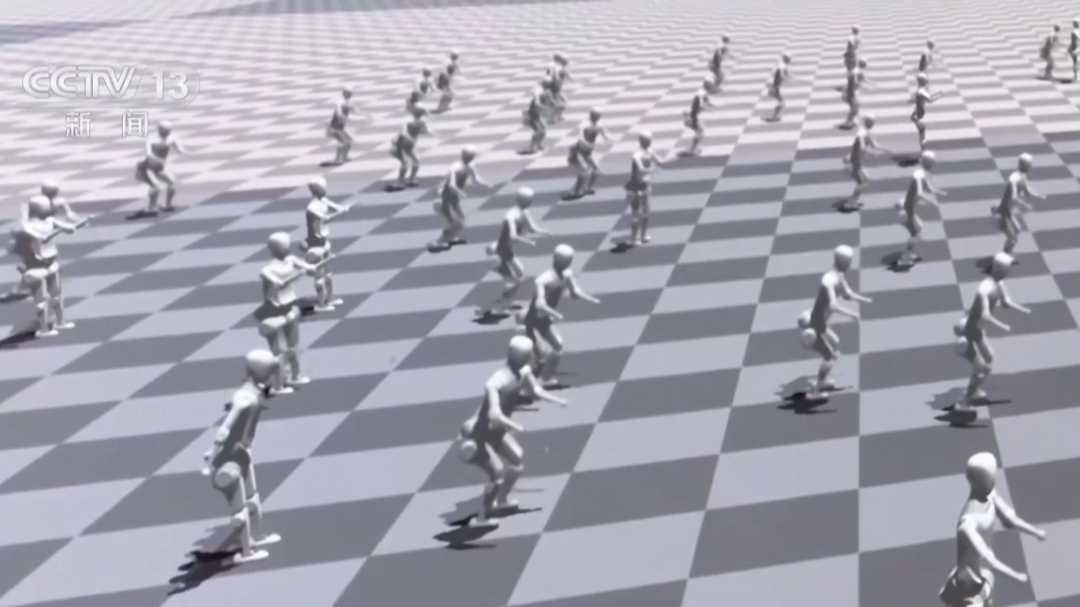
首先,团队在数字世界中通过动力学计算,得到了翻跟头的最优轨迹。然后,在虚拟仿真环境中,利用强化学习方法,让大量机器人模仿这一轨迹,不断试错和改进。此外,团队还引入了课程学习方法,让机器人从简单到复杂,逐步掌握精准轨迹复刻。
最后,将训练好的算法应用于实体机器人,并通过反复测试和系统优化,使真实机器人也具备后空翻的能力。

团队算法工程师李胜涛:我们通过关节角度跟踪奖励和惩罚机制,让机器人不断贴合专家数据,实现技能提升。
专家指出,无论是爬台阶还是后空翻,机器人动作技能的增强都离不开强化学习这一人工智能学习范式。它让机器人在未知的数字世界中通过试错和惩罚机制自主进化。
北京人形机器人创新中心首席技术官唐剑:强化学习训练难度大,真实环境训练可能导致机器人损坏。因此,在虚拟环境中进行训练成为关键,尽管虚拟与真实环境间存在误差。
(文章来源:央视新闻)

郑重声明:以上内容与本站立场无关。本站发布此内容的目的在于传播更多信息,本站对其观点、判断保持中立,不保证该内容(包括但不限于文字、数据及图表)全部或者部分内容的准确性、真实性、完整性、有效性、及时性、原创性等。相关内容不对各位读者构成任何投资建议,据此操作,风险自担。股市有风险,投资需谨慎。如对该内容存在异议,或发现违法及不良信息,请发送邮件至yxiu_cn@foxmail.com,我们将安排核实处理。